
-

客服電話
400-7007-555 -

在線客服
-

Online

-

公眾號


回到頂部

USV-1000水質走航監測無人船
產品概述:
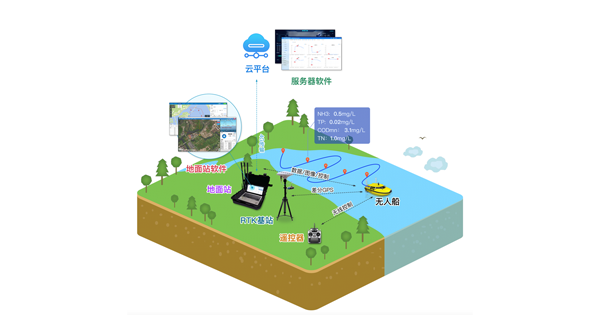
無(wu)人(ren)(ren)船(chuan)(chuan)(chuan)系(xi)統(tong)由無(wu)人(ren)(ren)船(chuan)(chuan)(chuan)體、遙控(kong)器(qi)、地面基站(zhan)(zhan)、微(wei)型定位系(xi)統(tong)、船(chuan)(chuan)(chuan)載儀器(qi)和地面站(zhan)(zhan)軟(ruan)件組(zu)成。操作員可(ke)用(yong)遙控(kong)器(qi)對無(wu)人(ren)(ren)船(chuan)(chuan)(chuan)進行手動控(kong)制;也(ye)可(ke)以(yi)通(tong)過地面站(zhan)(zhan)設置無(wu)人(ren)(ren)船(chuan)(chuan)(chuan)進行自動駕(jia)駛。在航(hang)行的(de)同時,自動采集江河湖庫等地表水(shui)體的(de)水(shui)質數(shu)據、水(shui)面視頻圖像(xiang)和無(wu)人(ren)(ren)船(chuan)(chuan)(chuan)狀態(tai)信(xin)息。測(ce)試數(shu)據同步(bu)上傳到到的(de)便攜電腦(nao)上運行的(de)“無(wu)人(ren)(ren)船(chuan)(chuan)(chuan)走(zou)航(hang)分(fen)析軟(ruan)件”中進行分(fen)析計(ji)算(suan)。
產品概述
- 無人船系統由無人船體、遙控器、地面基站、微型定位系統、船載儀器和地面站軟件組成。
- 操作員可用遙控器對無人船進行手動控制;也可以通過地面站設置無人船進行自動駕駛。
- 在航行的同時,自動采集江河湖庫等地表水體的水質數據、水面視頻圖像和無人船狀態信息。
- 測試數據同步上傳到到的便攜電腦上運行的“無人船走航分析軟件”中進行分析計算。
產品特點
- 船體采用高碳纖維材質,強度高、重量輕;
- 具有防碰撞、防沉沒和自動避障功能,航行更安全;
- 10Km以上超視距距離,可執行遠距離任務;
- 免試劑水質分析儀器,水質檢測精度真實準確;
- 體積小巧,可用家用轎車運載;
- 地面站軟件功能強大;
應用領域
污染源廢水排放走航監測;市政污水走航監測;地表水走航監測;水源保護區、生態敏感區走航監測
媒體資料














